LRK
Erfahrenes Mitglied
Mahlzeit!
Oh, neues Site-Design. ) Nunja, kommen wir zur Sache:
) Nunja, kommen wir zur Sache:
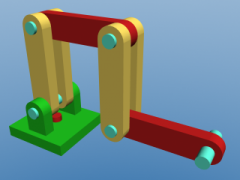
Also ich möchte mich eingehender mit der Konstruktion von Roboterarmen beschäftigen, welche über IK selbstständig eine zulässige Bewegung durch den Raum durchführen und ich lediglich den Arbeitskopf "per Hand" animiere. Dabei besteht der geplante Arm aus mehreren einachsigen Gelenken, denen eine entsprechende Beschränkung zugewiesen wurde. Zu Beginn habe ich hier mal einen simplen Prototypen erstellt:
<siehe Anlagen>
Wie eindeutig ersichtlich, kann die grüne Basis sich um die eigene Hochachse drehen, während die restlichen Gelenke sich um die Querachse bewegen. Der letzte blaue Pinn bildet bisher das Ende der IK-Kette. Mit dieser Apparatur sollte folglich nahezu jeder Punkt im Raum um den Arm angefahren werden können doch leider kriege ich keine wirklich gut funktionierende IK-Lösung hin, die IK-Ziele werden nicht zuverlässig verfolgt. Wer sich die Max-Datei (Max 2008) ansehen will findet sie bei den Anlagen. Drin enthalten sind zwei Splines zum Test der Bewegung durch Pfadbindung eines Helfers. Zwei IK-Ketten sind gleichzeitig aktiv um das bisherige halbwegs brauchbare Ergebniss zu erreichen. Wäre schön, wenn sich jemand findet, der dazu ein paar konstruktive Worte loswerden kann.
Grüsse.
Oh, neues Site-Design.
) Nunja, kommen wir zur Sache:Also ich möchte mich eingehender mit der Konstruktion von Roboterarmen beschäftigen, welche über IK selbstständig eine zulässige Bewegung durch den Raum durchführen und ich lediglich den Arbeitskopf "per Hand" animiere. Dabei besteht der geplante Arm aus mehreren einachsigen Gelenken, denen eine entsprechende Beschränkung zugewiesen wurde. Zu Beginn habe ich hier mal einen simplen Prototypen erstellt:
<siehe Anlagen>
Wie eindeutig ersichtlich, kann die grüne Basis sich um die eigene Hochachse drehen, während die restlichen Gelenke sich um die Querachse bewegen. Der letzte blaue Pinn bildet bisher das Ende der IK-Kette. Mit dieser Apparatur sollte folglich nahezu jeder Punkt im Raum um den Arm angefahren werden können doch leider kriege ich keine wirklich gut funktionierende IK-Lösung hin, die IK-Ziele werden nicht zuverlässig verfolgt. Wer sich die Max-Datei (Max 2008) ansehen will findet sie bei den Anlagen. Drin enthalten sind zwei Splines zum Test der Bewegung durch Pfadbindung eines Helfers. Zwei IK-Ketten sind gleichzeitig aktiv um das bisherige halbwegs brauchbare Ergebniss zu erreichen. Wäre schön, wenn sich jemand findet, der dazu ein paar konstruktive Worte loswerden kann.
Grüsse.
Anhänge
Zuletzt bearbeitet: