Vereth
Erfahrenes Mitglied
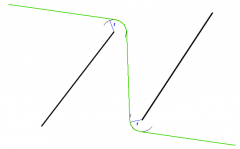
Sorry, ich war etwas voreilig. Mein Vorgehen hat den Fehler, dass das 'Tunneln' durch Eckpunkte von Streckenzügen nicht genügend berücksichtigt wird; du hattest auf das Problem schon hingewiesen, Matthias:-(.
Man kann das Problem aber vermeiden und trotzdem zu einer guten Näherung kommen. Man erstellt aus den Punkten, Start- und Zielpunkt ausgenommen, ein Voronoi-Diagramm; dadurch bekommt man Wegpunkte, die im freien Gebiet sind. Anschließend ergänzt man das Diagramm um Strecken, die zu Start- und Zielpunkt führen. Aus dem resultierenden Graphen entfernt man alle Kanten, die eine der vorgegebenen Strecken kreuzen. Dadurch erhält man einen planaren Graph, auf den man einen Algorithmus zur Wegsuche anwenden kann. Dies führt zumindest zu einer brauchbaren Näherungslösung.
Wenn einem das nicht reicht, kann man immer noch einen Algorithmus implementieren, der den Pfad verkürzt. Ich habe schon eine vage Idee, wie man so etwas machen könnte, aber es ist noch zu früh, darüber zu schreiben.
PS: Matthias, deine spontane Idee ist schon ein guter Ansatz, aber was geschieht, wenn du in einem Punkt ein ganzes Strahlenbündel hast?
Man kann das Problem aber vermeiden und trotzdem zu einer guten Näherung kommen. Man erstellt aus den Punkten, Start- und Zielpunkt ausgenommen, ein Voronoi-Diagramm; dadurch bekommt man Wegpunkte, die im freien Gebiet sind. Anschließend ergänzt man das Diagramm um Strecken, die zu Start- und Zielpunkt führen. Aus dem resultierenden Graphen entfernt man alle Kanten, die eine der vorgegebenen Strecken kreuzen. Dadurch erhält man einen planaren Graph, auf den man einen Algorithmus zur Wegsuche anwenden kann. Dies führt zumindest zu einer brauchbaren Näherungslösung.
Wenn einem das nicht reicht, kann man immer noch einen Algorithmus implementieren, der den Pfad verkürzt. Ich habe schon eine vage Idee, wie man so etwas machen könnte, aber es ist noch zu früh, darüber zu schreiben.
PS: Matthias, deine spontane Idee ist schon ein guter Ansatz, aber was geschieht, wenn du in einem Punkt ein ganzes Strahlenbündel hast?
Zuletzt bearbeitet:

") Nein, im Ernst, mein Verfahren macht natürlich Probleme, wenn mehr als zwei Strecken an einem Punkt enden.
Nein, im Ernst, mein Verfahren macht natürlich Probleme, wenn mehr als zwei Strecken an einem Punkt enden.