Hallo,
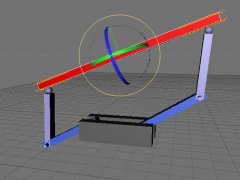
zwei Arme sollen einen Balken Tragen (Testobjekte (C4D 10.5) und Screenshots sind hochgeladen).
Anhang anzeigen IK-Demo.zip
Die IK funktioniert prima, solange ich den roten Balken rotiere oder bewege (s. 1_Kinematik_Demo.c4d). Mein Ziel ist jedoch die beiden (dunkelblauen) "Tragarme" in ihrem Basisgelenk zu drehen und damit eine resultierende Bewegung des (roten) Balkens zu erhalten.
Mein Versuch dies mit zwei IKs zu erreichen (s. 2_Kinematik_Demo_zwei_IKs.c4d) schlug leider auch fehl. Hier bewegt sich der Balken zunächst nicht, dann aber nur sporadisch und dreht sich dann seitlich weg. Dieses mit einem Ausrichten-Tag aufzufangen lies die Szene leider in ihrer Bewegung einfrieren. In einem weiteren Versuch sollte ein Ausleger die Drehung auffangen (s. 3_Kinematik_Demo_zwei_IKs_mit_Ausleger.c4d), was leider auch nicht von Erfolg gekrönt war...
Weiss jemand Rat zu meinem Problem? In anderen Beiträgen konnte ich leider auch nichts finden. Vielleicht hilft auch schon ein Hinweis, wo ich etwas dazu nachlesen kann.
P.S. Im ersten Beispiel sind die Gelenke des Balkens nicht fest, d.h. sie ziehen sich wie von einem Gummiband gehalten auseinander. Wie kann ich dies verhindern? Meine Versuche gingen zur IK-Expression und dem Feature "Ziel Constrain". Hat dann aber leider nicht funktioniert
zwei Arme sollen einen Balken Tragen (Testobjekte (C4D 10.5) und Screenshots sind hochgeladen).
Anhang anzeigen IK-Demo.zip
Die IK funktioniert prima, solange ich den roten Balken rotiere oder bewege (s. 1_Kinematik_Demo.c4d). Mein Ziel ist jedoch die beiden (dunkelblauen) "Tragarme" in ihrem Basisgelenk zu drehen und damit eine resultierende Bewegung des (roten) Balkens zu erhalten.
Mein Versuch dies mit zwei IKs zu erreichen (s. 2_Kinematik_Demo_zwei_IKs.c4d) schlug leider auch fehl. Hier bewegt sich der Balken zunächst nicht, dann aber nur sporadisch und dreht sich dann seitlich weg. Dieses mit einem Ausrichten-Tag aufzufangen lies die Szene leider in ihrer Bewegung einfrieren. In einem weiteren Versuch sollte ein Ausleger die Drehung auffangen (s. 3_Kinematik_Demo_zwei_IKs_mit_Ausleger.c4d), was leider auch nicht von Erfolg gekrönt war...
Weiss jemand Rat zu meinem Problem? In anderen Beiträgen konnte ich leider auch nichts finden. Vielleicht hilft auch schon ein Hinweis, wo ich etwas dazu nachlesen kann.
P.S. Im ersten Beispiel sind die Gelenke des Balkens nicht fest, d.h. sie ziehen sich wie von einem Gummiband gehalten auseinander. Wie kann ich dies verhindern? Meine Versuche gingen zur IK-Expression und dem Feature "Ziel Constrain". Hat dann aber leider nicht funktioniert